비올라-존스 객체 탐지기라고도 불리는 이 방법은 특징 기반 얼굴 탐지를 위한 알고리즘으로 널리 알려져 있습니다.
HOG Detector (N. Dalal et al., 2005):
Histogram of Oriented Gradients (HOG)는 이미지의 국소적인 방향 정보를 사용하여 객체를 탐지하는 방법입니다.
DPM (P. Felzenszwalb et al., 2008):
Deformable Part Model (DPM)은 물체를 작은 부분들로 분할하여 각 부분의 위치와 형태를 모델링하는 방법입니다.
2010년에는 Bounding Box Regression이 추가되어 성능이 향상되었습니다.
2. 딥러닝 기반 탐지 방법 (Deep Learning Based Detection Methods)
2012년 이후:
딥러닝 기반 탐지 방법이 등장하면서 객체 탐지의 패러다임이 전환되었습니다.
특히, AlexNet의 도입으로 인해 딥러닝이 본격적으로 활용되기 시작했습니다.
2-1. Two-Stage Detector
R-CNN (R. Girshick et al., 2014):
Region-based Convolutional Neural Networks (R-CNN)은 이미지에서 후보 영역을 생성하고, 각 영역에 대해 CNN을 적용하여 객체를 분류합니다.
SPPNet (K. He et al., 2014):
Spatial Pyramid Pooling Network는 이미지 크기에 관계없이 고정된 크기의 특징 맵을 생성하여 R-CNN의 단점을 보완합니다.
Fast R-CNN (R. Girshick, 2015):
R-CNN의 느린 속도를 개선한 버전으로, 단일 네트워크에서 영역 제안과 분류를 동시에 수행합니다.
Faster R-CNN (S. Ren et al., 2015):
Region Proposal Network (RPN)를 도입하여 매우 빠른 속도로 영역 제안을 생성하고, 이를 기반으로 객체를 탐지합니다.
2-2. One-Stage Detector
YOLO (J. Redmon et al., 2016):
You Only Look Once (YOLO)는 이미지 전체를 단일 단계로 처리하여 매우 빠른 속도로 객체를 탐지합니다.
SSD (W. Liu et al., 2016):
Single Shot MultiBox Detector (SSD)는 여러 크기의 디폴트 박스를 사용하여 다양한 크기의 객체를 탐지합니다.
RetinaNet (T. Y. Lin et al., 2017):
Focal Loss를 도입하여 클래스 불균형 문제를 해결하고, 성능을 크게 향상시켰습니다.
3. 최신 탐지 방법
Pyramid Networks (T. Y. Lin et al., 2017):
다양한 해상도의 특징 맵을 사용하여 작은 객체를 더 잘 탐지합니다.
SSD Network 구조
한번 SSD Network 구조에 데하여 설명을 해보겠습니다.
1. 입력 이미지
크기: 300x300x3
입력 이미지의 크기는 300x300 픽셀이며, RGB 채널을 사용합니다.
2. VGG-16 기반 특징 추출기
Conv4_3 레이어:
38x38x512 크기의 특징 맵을 출력합니다.
VGG-16 네트워크의 Conv5_3 레이어까지 사용하여 특징을 추출합니다.
3. Extra Feature Layers (추가 특징 레이어)
Conv6 (FC6):
19x19x1024 크기의 특징 맵을 출력합니다.
Convolution 레이어로 변환된 완전 연결 (fully connected) 레이어입니다.
Conv7 (FC7):
19x19x1024 크기의 특징 맵을 출력합니다.
Convolution 레이어로 변환된 또 다른 완전 연결 레이어입니다.
4. 추가 Convolution 레이어
Conv8_2:
10x10x512 크기의 특징 맵을 출력합니다.
두 개의 Convolution 레이어 (Conv 3x3x256-s2, Conv 3x3x512-s1)로 구성되어 있습니다.
Conv9_2:
5x5x256 크기의 특징 맵을 출력합니다.
두 개의 Convolution 레이어 (Conv 3x3x128-s2, Conv 3x3x256-s1)로 구성되어 있습니다.
Conv10_2:
3x3x256 크기의 특징 맵을 출력합니다.
두 개의 Convolution 레이어 (Conv 3x3x128-s2, Conv 3x3x256-s1)로 구성되어 있습니다.
Conv11_2:
1x1x256 크기의 특징 맵을 출력합니다.
두 개의 Convolution 레이어 (Conv 3x3x128-s2, Conv 3x3x256-s1)로 구성되어 있습니다.
5. Classifier (분류기)
각 특징 맵에 대해 Convolution 연산을 통해 객체 클래스와 위치를 예측합니다.
Conv4_3 레이어:
38x38x(4x(Classes+4)) 크기의 출력을 생성합니다.
Conv7 레이어:
19x19x(6x(Classes+4)) 크기의 출력을 생성합니다.
Conv8_2, Conv9_2, Conv10_2, Conv11_2 레이어:
각각 10x10, 5x5, 3x3, 1x1 크기의 출력에서 (4x(Classes+4))를 생성합니다.
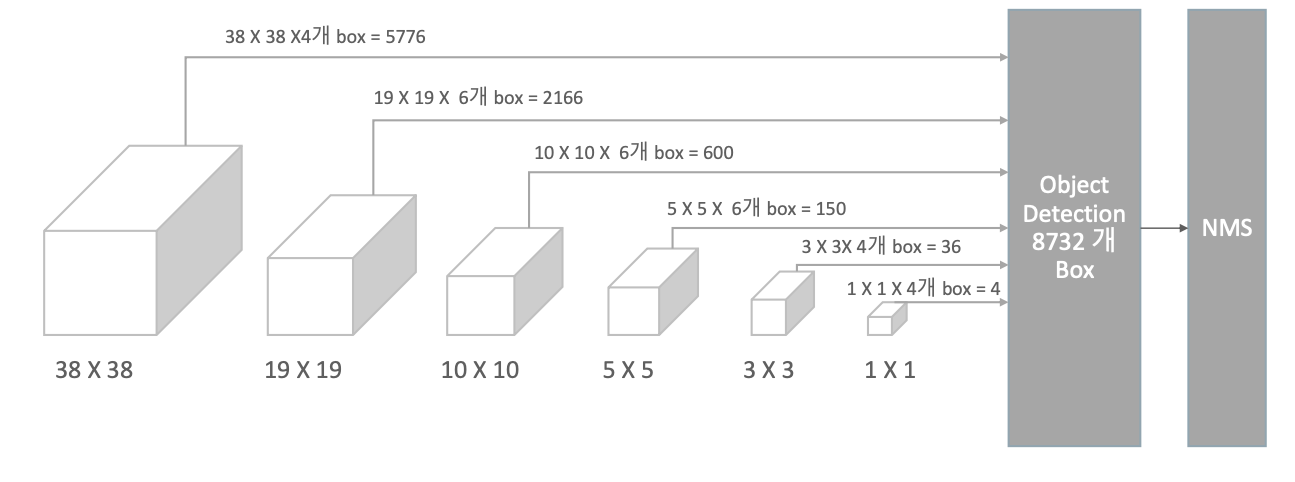
6. Detections (디텍션)
8732 per Class:
다양한 크기와 비율의 anchor box를 사용하여 최종적으로 8732개의 예측 박스를 생성합니다.
각 박스는 클래스 확률과 위치 좌표를 포함합니다.
SSD 주요 구성 요소
SSD Network은 주요 2개의 구성 요소로 이루어져 있습니다. Multi Scale Feature Layer, Default (Anchor) Box 2개로 구성됩니다.
Multi Scale Feature Layer
Multi Scale Feature Layer는 SSD(Single Shot MultiBox Detector)의 핵심 구성 요소로, 객체의 크기와 위치에 따라 다양한 해상도의 특징 맵을 사용하여 객체를 탐지합니다.
이러한 다중 해상도 특징 맵은 작은 객체부터 큰 객체까지 다양한 크기의 객체를 효과적으로 탐지할 수 있게 합니다.
Default (Anchor) Box
Default Box(Anchor Box)는 SSD에서 특정 위치에서 다양한 크기와 비율의 객체를 예측하기 위해 사용됩니다.
각 특징 맵의 픽셀 위치에서 여러 개의 anchor box를 생성하고, 이를 기준으로 객체의 위치와 크기를 조정합니다.
이미지 Scale 조정에 따른 여러 크기의 Object Detection
사진을 보면 원래의 image에서 sliding window 방식을 이용해서 Object detection을 합니다.
그리고 Scale(크기)를 줄여서 다시 Object detection을 하는 방식으로 계속 반복하다가, Object를 탐지하면 알고리즘의 동작이 멈춥니다.
이렇게 이미지 피라미드의 개념을 도입해서 Ground Truth에 기반하여 이미지 크기를 줄이는 방식으로 Object Detection을 합니다.
다른 크기의 Feature Map을 이용한 Object Detection
서로 다른 크기의 Feature Map(CNN Architecture)들을 기반으로 Object Detection 수행합니다.
첫번째 Feature Map은 원본 이미지의 위치 정보를 가지며, Size가 작아지면서 축약, 핵심적인 이미지 특징으로 변경됩니다.
결론은 Feature Map Size가 작을수록 큰 Object가 잘 Detect 됩니다.
Feature Map기반의 Multi-Scale Feautre Layer
앞에서 설명하듯이, Feature Map의 크기가 작을수록 더 큰 이미지를 찾을 수 있습니다.
Anchor Box 기반의 Object Detection 모델– Faster RCNN
Faster R-CNN은 Region Proposal Network (RPN)을 사용하여 객체 탐지 성능을 향상시킨 모델로, 두 단계로 이루어져 있습니다. Region Proposal Network와 Fast R-CNN.
1. Convolutional Network
기본 특징 맵 생성:
입력 이미지를 Convolutional Network를 통해 기본 특징 맵을 생성합니다.
이 특징 맵은 이후의 Region Proposal Network와 객체 분류 및 경계 박스 조정에 사용됩니다.
2. Region Proposal Network (RPN)
Region Proposal Network (RPN):
RPN은 기본 특징 맵을 입력으로 받아서 객체가 있을 법한 영역(Region Proposal)을 생성합니다.
각 위치마다 여러 크기와 비율의 anchor box를 사용하여 객체의 존재 여부를 예측합니다.
RPN의 출력은 잠재적 객체 위치의 후보 영역(Region Proposal)들로, 이는 이후의 Fast R-CNN 단계에서 사용됩니다.
RPN의 주요 구성 요소
Convolution Layer:
입력 특징 맵을 받아서 고정된 크기의 필터를 적용하여 특징을 추출합니다.
Anchor Box:
각 위치마다 다양한 크기와 비율의 anchor box를 생성하여 객체를 예측합니다.
일반적으로 3가지 크기와 3가지 비율의 anchor box를 사용하여 총 9개의 anchor box를 생성합니다.
Objectness Score:
각 anchor box에 대해 객체가 있을 확률을 예측하는 점수입니다.
클래스의 개수가 2개(객체, 배경)인 softmax 분류기를 통해 계산됩니다.
Bounding Box Regression:
각 anchor box에 대해 위치 조정을 위한 경계 박스 오프셋을 예측합니다.
3. ROI Pooling
ROI Pooling:
RPN에서 제안된 후보 영역을 사용하여 입력 특징 맵에서 해당 영역의 특징을 추출합니다.
이 과정에서 모든 후보 영역을 고정된 크기의 특징 맵으로 변환합니다.
4. Object Classification and Bounding Box Regression
Fully Connected Layer:
ROI Pooling을 통해 얻은 고정 크기의 특징 맵을 입력으로 받아서 객체 분류 및 경계 박스 조정을 수행합니다.
Object Classification:
각 후보 영역에 대해 객체의 클래스(예: 사람, 자동차 등)를 예측합니다.
softmax를 사용하여 클래스 확률을 계산합니다.
Bounding Box Regression:
각 후보 영역에 대해 경계 박스를 조정하여 더 정확한 객체 위치를 예측합니다.
연속된 값(좌표)을 예측하기 위해 회귀(regression)를 사용합니다.
Summary - Convolutional Network:기본 특징 맵 생성. - Region Proposal Network (RPN):Anchor box를 사용하여 객체의 잠재적 위치(Region Proposal) 예측. - ROI Pooling:Region Proposal을 고정된 크기의 특징 맵으로 변환. - Object Classification and Bounding Box Regression:후보 영역에 대해 객체 분류와 경계 박스 조정.
RPN에서의 Anchor Box의 활용
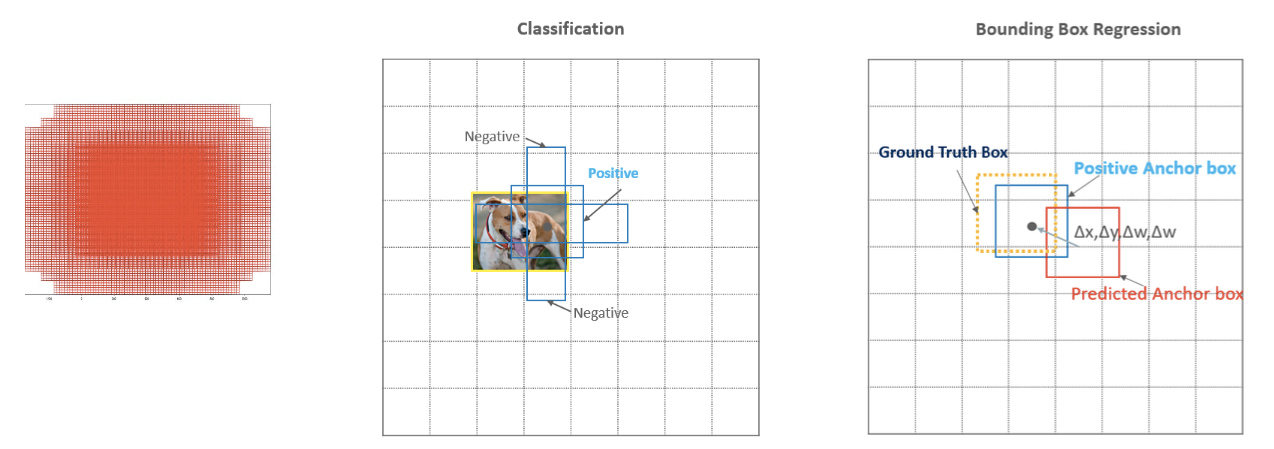
Classification (분류)
각 Anchor Box는 객체를 포함하는지 여부에 따라 Positive(양성) 또는 Negative(음성)로 분류됩니다.
이미지 중앙에 있는 개의 얼굴을 예로 들면, 개를 포함하는 Anchor Box는 Positive로 분류되고, 그렇지 않은 Anchor Box는 Negative로 분류됩니다.
Positive Anchor Box는 객체(Ground Truth Box)와 높은 IoU(Intersection over Union)를 가지며, 이 경우 개의 얼굴을 포함한 Anchor Box들이 Positive로 분류되었습니다.
반면, 개의 얼굴을 포함하지 않은 Anchor Box들은 Negative로 분류되었습니다.
Bounding Box Regression (경계 박스 회귀)
Positive로 분류된 Anchor Box들은 경계 박스 회귀를 통해 정확한 객체 위치로 조정됩니다.
Ground Truth Box (실제 객체 위치를 나타내는 상자)와 비교하여 Positive Anchor Box의 위치와 크기를 조정합니다.
회귀 모델은 Anchor Box의 중심 좌표(x, y), 너비(w), 높이(h)를 조정하는 오프셋(Δx, Δy, Δw, Δh)을 예측하여 Predicted Anchor Box (예측된 객체 위치 상자)를 만듭니다.
이미지에서는 Positive Anchor Box가 Ground Truth Box에 맞춰 조정된 모습을 보여줍니다.
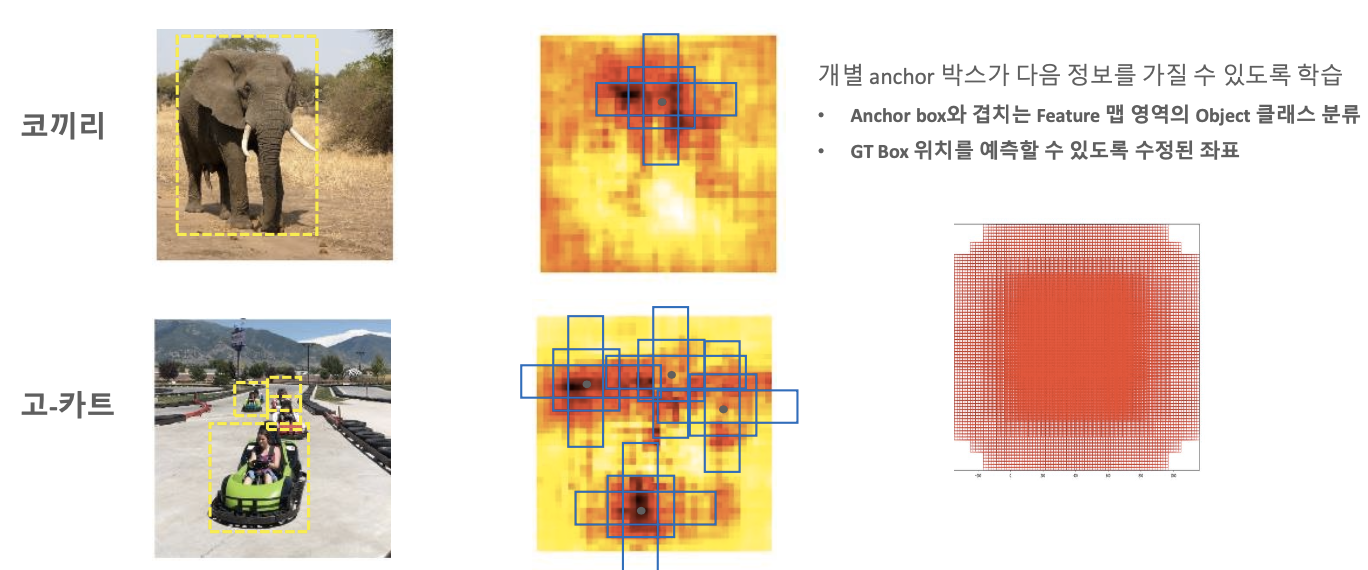
Anchor box 를 활용한 Object Detection
Anchor Box를 활용한 Object Detection에서는 개별 Anchor Box가 다음 정보들을 가질 수 있도록 학습합니다.
Anchor Box와 겹치는 Feature Map 영역의 Object 클래스를 분류합니다.
이때 Ground Truth 위치를 예측할 수 있도록 좌표를 수정합니다.
또한 개별 Anchor Box별로 Detection 하려는 Object 유형의 Softmax 함수값, 수정 좌표 값을 가져와서 Anchor Box를 활용한 학습을 할떄 활용합니다.
SSD Network 구성
SSD (Single Shot MultiBox Detector) 네트워크의 다양한 크기의 특징 맵과 그로부터 생성된 Anchor Box들을 설명해 보겠습니다.
그후, 4x4 Feature Map을 한번 봐보면, 더 낮은 해상도로 추출되는 대신, 더 객체 탐지를 유리하게 하기 위해 size를 줄입니다.
그리고 4x4 Feature Map을 보면 Location (loc) 와 Confidence (conf)가 있습니다. 설명을 해보면
Location (loc):
각 Anchor Box의 위치를 조정하는 오프셋 값입니다.
(cx,cy,w,h)(c_x, c_y, w, h)(cx,cy,w,h)로 표시되며, Anchor Box의 중심 좌표와 너비 및 높이를 나타냅니다.
Confidence (conf):
각 Anchor Box가 특정 클래스에 속할 확률을 나타내는 값입니다.
(c1,c2,⋯ ,cp)(c_1, c_2, cdots, c_p)(c1,c2,⋯,cp)로 표시되며, 각 클래스에 대한 확률을 나타냅니다.
여기서 ppp는 클래스의 수를 의미합니다.
SSD Training
여기서 우리가 알아야 할건 Matching 전략, Loss 함수 라는 것이 있습니다.
Matching 전략은 Bounding box와 겹치는 IOU가 0.5 이상인 Default(Anchor) Box 들의 Classification과 Boudning box Regression을 최적화 학습을 수행하는 전략입니다.
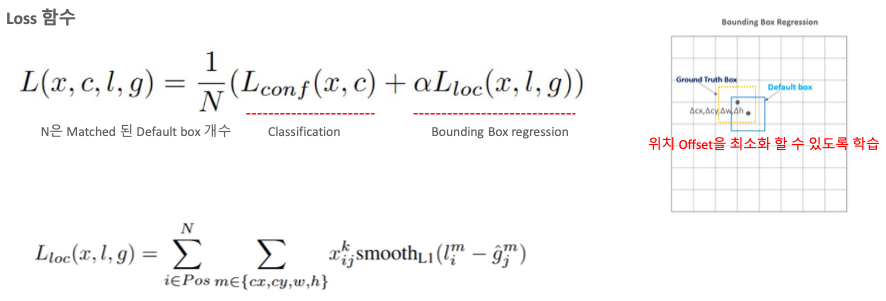
Loss 함수는 전체 손실 함수와 분류 손실 (Classification Loss), 위치 손실 (Localization Loss)이 있습니다.
전체 Loss Function - Parameter
N: 매치된 Default Box(Anchor Box)의 개수
Lconf(x,c): 분류 손실 (Classification Loss)
Lloc(x,l,g): 위치 손실 (Localization Loss)
α: 위치 손실의 중요도를 조정하는 가중치
분류 손실 (Classification Loss)
분류 손실은 각 Anchor Box가 특정 클래스에 속할 확률을 예측하는 손실입니다.
클래스 확률 예측에서 발생하는 오차를 계산합니다.
일반적으로 소프트맥스(Softmax) 함수와 크로스 엔트로피(Cross-Entropy) 손실을 사용합니다.
위치 손실 (Localization Loss)
위치 손실은 예측된 경계 박스와 실제 경계 박스(Ground Truth Box) 간의 위치 차이를 최소화하는 손실입니다.
여기서 Pos는 Positive Anchor Box(객체를 포함하는 Anchor Box)를 나타냅니다.
xk^ij: 매치된 Anchor Box와 Ground Truth Box 간의 인덱스 매칭을 의미합니다.
smoothL1: Smooth L1 손실 함수, 회귀 문제에서 자주 사용됩니다.
l^mi: 예측된 위치 값 (Anchor Box의 중심 좌표와 크기)
g^mj: 실제 위치 값 (Ground Truth Box의 중심 좌표와 크기)
Bounding Box Regression
Bounding Box Regression은 예측된 Anchor Box를 실제 객체의 위치에 맞추기 위해 위치 오프셋을 조정합니다.
그림을 보면, 그림에서 파란색 상자는 Default Box(Anchor Box), 빨간색 상자는 Ground Truth Box를 나타냅니다.
Δ(cx,cy,w,h)는 Default Box에서 Ground Truth Box로의 위치 및 크기 오프셋을 나타냅니다.
위치 손실은 이 오프셋을 최소화하여 예측된 Anchor Box가 실제 객체 위치와 일치하도록 학습합니다.
Design choice별 Performance
SSD300은 SSD Network가 300x300을 의미합니다.
Data Augmentation을 진행할때 아래의 절차에 따라서 진행합니다.
GT Object와 IOU가 0.1, 0.3, 0.5, 0.7, 0.9가 될 수 있도록 특정 Object들의 Image를 잘라냅니다.
잘라낸 이미지를 random 하게 sampling 합니다.
잘라낸 sample 이미지는 0.1 ~ 1사이로, aspect ratio는 1/2 ~ 2 사이로 크기를 맞춥니다.
개별 sample 이미지를 다시 300x300 으로 고정. 그리고 그중 50%는 horizontal flip 입니다.
horizontal flip은 Data에 인위적인 변화를 준다 -> Data Augmentation입니다.
여기서 짚고 넘어가야 하는건, 작은 Object Detect시 성능이 떨어지는 이유합니다. 이유는, Feature Map에 Anchor Base하는 Object Detection Model이 사용되기 때문입니다. 또한 One-Stage Detector 문제가 발생해서 성능이 떨어집니다. 그래서 해결책은 Feature Pyramid 방식을 사용합니다.
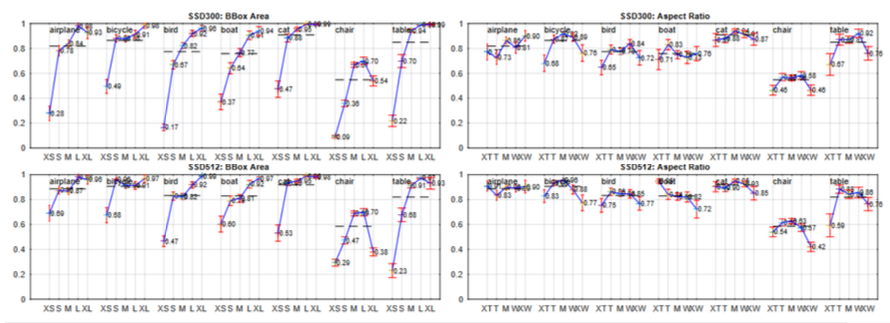
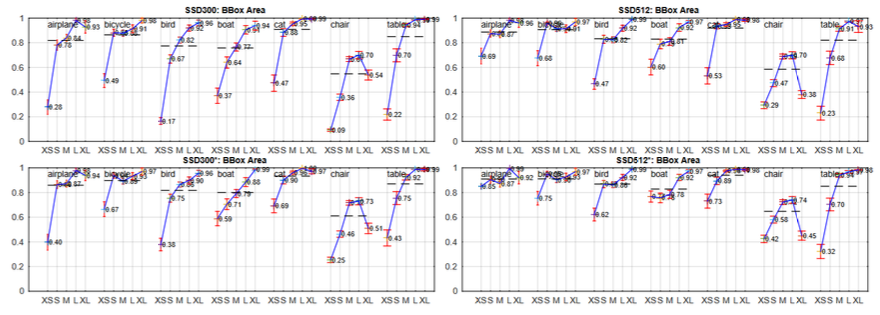
작은 Object의 Detection 성능 & Data Augmentation 후 작은 Object의 Detection 성능
작은 Object의 Detection 성능Data Augmentation 후 작은 Object의 Detection 성능 향상
요약을 해보자면, Data Augmentation (데이터 증강) 전
작은 객체(XSS, S)와 극단적인 비율의 객체 탐지 성능이 낮았습니다.
SSD512 모델이 SSD300 모델보다 더 나은 성능을 보여주었지만, 여전히 작은 객체 탐지에는 한계가 있었습니다.
Data Augmentation (데이터 증강) 후
작은 객체와 극단적인 비율의 객체 탐지 성능이 크게 향상되었습니다.
SSD300과 SSD512 모두 데이터 증강을 통해 작은 객체 탐지 성능이 개선되었습니다.
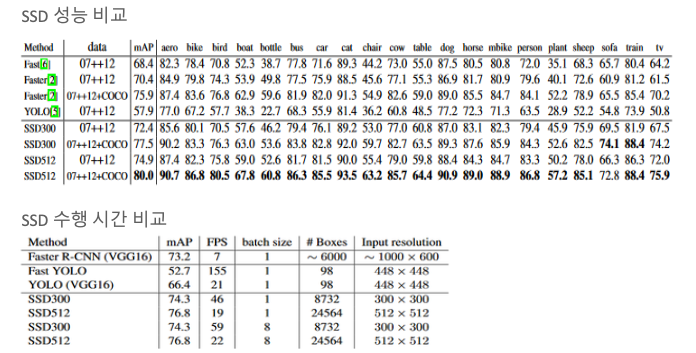
SSD Detection 성능 및 수행 시간 비교
정리를 해보면, SSD 모델은 작은 객체 탐지 성능이 우수하며, 특히 SSD512 모델이 가장 높은 성능을 보여줍니다.
또한 데이터셋이 다양해질수록 성능이 향상됩니다.
그리고, Faster R-CNN은 높은 정확도를 보이지만, 속도가 느립니다.
YOLO는 매우 빠른 속도를 보이지만, 정확도가 상대적으로 낮습니다.
SSD 모델은 빠른 속도와 높은 정확도의 균형을 잘 맞춘 모델로, 특히 SSD300은 속도와 정확도 모두 우수합니다.